中山祥云平台
咨询热线
152-1787-3549
扫二维码
添加客服微信
联系电话:18007562606/15217873549
传 真:0756-8677546
赢咖6邮 箱:rundingzhineng@126.com
公司地址:广东省珠海市香洲区南屏科技园屏西六路3号

特点>>
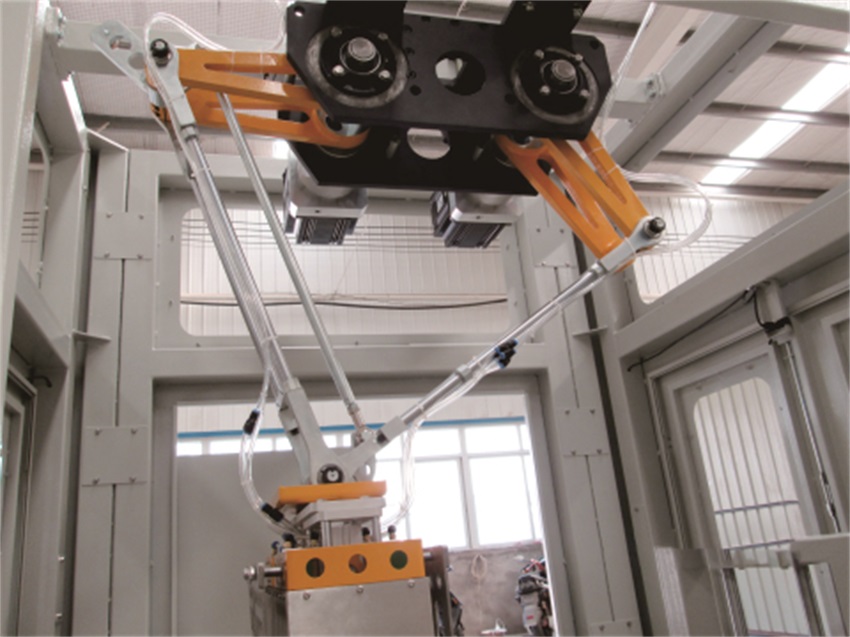
赢咖6将输送过来的瓶(或盒子)整理排列为规定形式后,输送到并联机器人抓手处,抓手动作将排列好的瓶子(或盒子)抓起,再水平移动,装入到空箱输送定位好的箱子中,装完后箱子输出,整个过程流畅、简捷明了.装箱速度可以达15-18箱/分
技术设计特点:
1. 并联机器人模块为二维平动的高速重型机器人,外形简洁、美观,结构新颖、独特,维修方便
2. 抓手模块可根据瓶型进行非标设计,适应范围广
3. 具有待机互锁功能,当缺料、缺纸箱,装箱机自动报警并进入待机状态
4. 采用触摸屏操作,可在人机界面上进行参数调整,调整简便,可显示生产速度,故障原因及位置,自动化程度高.
5. 抓取重量可达60公斤